

ADUPAD application


Please refer to the post below for how to connect Arduino and BT05.
[Arduino] - Arduino Basic code for BLE remote contol with BT05
SERIAL_BASIC_BT05.zip
- loop() function
bool gotData = false;
void loop() {
if (SerialBT.available()) { // when incomming data from HC06
uint8_t temp = SerialBT.read();
Serial.println(temp); // Output data of the HC06 to the serial monitor.
if (temp == 10) gotData = true; // if got '\n', the flag for response
} else {
if (gotData) { // if response
String setVal = "";
setVal += char(0xF4); // protocol header of text for ADUPAD with bluetooth
setVal += "Hello World ";
setVal += random(100,200); // the message for sending
setVal += char(0xF1); // protocol footer of text for ADUPAD with bluetooth
Serial.println(setVal); // Output the message to the serial monitor.
SerialBT.print(setVal); // send data to HC06 as response
gotData = false; // initialize the flag
delay(10); // delay for sending data at BT05
}
}
}
- Output of Serial Monitor after upload scketch "ARDUINO_BT05_BASIC.ino"

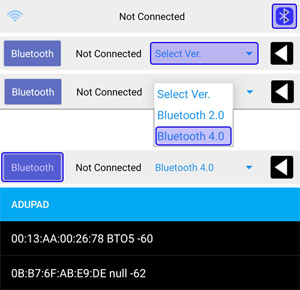
connecting to BT05 on the ADUPAD app
- Bluetooth 4.0 Search and Connection in the App
Click the Bluetooth icon in the app and select Bluetooth 4.0 in Select Ver.
Click the Bluetooth button and select the BT05.


Code for remote control with BLE of ADUPAD applications
- SerialBT_read() function
1. Protocol header definition
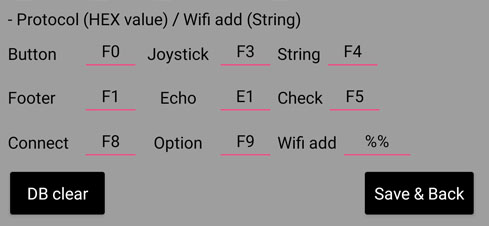
Define the headers for BLE in the Arduino sketch according to the protocol header settings in the ADUPAD app.
#define pinHD 0xF0
#define joyHD 0xF3
#define strHD 0xF4
#define footHD 0xF1
#define echoHD 0xE1
#define connectHD 0xF8
#define connectHDstr F("%%F8")
#define optionHD 0xF9
#define optionHDstr F("%%F9")
2. Code to check the connection attempt of ADUPAD app
bool appConnection = false;
if (appConnection) { // If app connection is confirmed
// Execute code after app connection is confirmed
} else {
String hd = connectHDstr;
if (SerialBT.peek() == hd[0]) appConnection = true; // Check if the value is %.
else { uint8_t dump = SerialBT.read(); }
}
3. Handling of values according to connection header "connectHDstr(%%F8)"
%%F8 + connect: Transmit the necessary app settings and current Arduino state values through the iniSet() and send_State() functions.
%%F8 + disconnect: Disconnect and change value of appConnection to false.
%%F8 + NA: Change setting values for BT05.
if (temp == F("connect")) { iniSet(); send_iniState(); }
else if (temp == F("disconnect")) { appConnection = false; Serial.println(F("disconnect")); }
else if (temp.startsWith(F("NA"))) { sendMessage(F("This funtion is not available.")); }
else Serial.println(temp);
4. Handling of values according to option header "optionHDstr(%%F9)"
void CheckF9(String temp) {
Serial.println(temp);
if (temp.startsWith(F("RAD"))) { } // if it starts with "RAD"
else if (temp.startsWith(F("CKB"))) { } // if it starts with "CKB"
else if (temp.startsWith(F("CHD"))) { } // if it starts with "CHD"
else if (temp.startsWith(F("LSD"))) { } // if it starts with "LSD"
else if (temp.startsWith(F("STR"))) { } // if it starts with "STR"
}
5. Handling of values according to button header "pinHD(0xF0)"
// 0xF0 + 1byte Num + 0xF1
while (SerialBT.peek() == pinHD) { // need depend on left arrow pad mode
SerialBT.readBytes(data, 3); // Store 3 bytes of data in array "data" from Serial Buffer
if (data[2] == footHD) { // if the third byte is 0xF1
pin_control(data[1]); // execute the code with the value of second byte
data[2] = 0;
}
delay(1);
}
6. Handling of values according to SeekBar(slide bar) header "joyHD(0xF3)"
// 0xF3 + 1byte Num(id) + 2byte Num(heading) + 1byte Num(strength) + 0xF1
while (SerialBT.peek() == joyHD) {
SerialBT.readBytes(data, 6); // Store 6 bytes of data in array "data" from Serial Buffer
if (data[5] == footHD) { // if the sixth byte is 0xF1
uint16_t value = data[3]; // Swap third and fourth bytes
value = value << 8 | data[2];
joystick_control(data[1], value, data[4]); // execute the code with values
data[5] = 0;
}
delay(1);
}
if (joyEcho) { sendJoyEcho(); joyEcho = 0; } // Prevent data transmission while receiving data
// refer to "Precautions when using the HC-06 with Serial communication" posted in Basic code.
Protocol function to send data from Arduino to app
1. Change the state of the button.
void sendPinState(uint8_t pin_val){
uint8_t pin[3] = {pinHD, pin_val, footHD};
SerialBT.write(pin, 3);
delay(10);
}
2. Transmits an echo for the received value of the button.
void sendPinEcho(uint8_t pin_val){
uint8_t pin[3] = {pinHD, pin_val, echoHD};
SerialBT.write(pin, 3);
delay(10);
}
3. Change the Joystick state of the app.
// id 0:Left Joystick, 1:Right Joystick 2:Gravity Sensor(change only text)
void sendJoyState(uint8_t id, uint16_t heading, uint8_t strength) {
uint8_t joy[6] = {joyHD, id, heading, heading >> 8, strength, footHD};
SerialBT.write(joy, 6);
delay(10);
}
4. Transmits the echo for the received value of the Joystick.
uint8_t joyEcho = 0;
uint8_t ecVal[12] = { 0, };
void send_joy_echo(uint8_t id, uint16_t heading, uint8_t strength) {
if (joyEcho > 2) joyEcho = 0;
ecVal[joyEcho*4] = id;
ecVal[(joyEcho*4)+1] = heading;
ecVal[(joyEcho*4)+2] = heading >> 8;
ecVal[(joyEcho*4)+3] = strength;
joyEcho++;
}
void sendJoyEcho() {
uint8_t ch = 0;
while (joyEcho) {
joyEcho--;
uint8_t joy[6] = {joyHD, ecVal[ch*4], ecVal[(ch*4)+1], ecVal[(ch*4)+2], ecVal[(ch*4)+3], echoHD};
SerialBT.write(joy, 6); ch++; delay(10);
}
}
5. Send text with over the limitation of transmit data length of BLE.
void sendText(String str) {
char temp [21]; // 18
uint16_t len = str.length();
uint8_t repeat = 1;
uint8_t endLen = 0;
if (len > 18) {
repeat = (len/18)+1;
endLen = (len%18);
} else endLen = len;
for (int r = 0; r < repeat; r++) {
temp[0] = strHD;
uint8_t ed = 0;
if (repeat-r > 1) ed = 18;
else ed = endLen;
for (int i = 1; i < ed+1; i++) {
temp[i] = str[(r*18)+i-1];
}
if (repeat-r > 1) temp[ed+1] = echoHD;
else temp[ed+1] = footHD;
temp[ed+2] = '\0';
SerialBT.print(temp);
delay(10);
}
}
6. Instruct the app to click the Disconnect Button.
void sendDisconnect(){ // order disconnect to App
uint8_t setVal[3] = {connectHD, 0x01, 0x00};
SerialBT.write(setVal, 3);
delay(10);
}
7. Outputs the message in the form of a pop-up.
void send_message(String str, uint8_t head, uint8_t fn) {
char temp [21]; // 18
uint16_t len = str.length();
uint8_t repeat = 1;
uint8_t endLen = 0;
if (len > 17) {
repeat = (len/17)+1;
endLen = (len%17);
} else endLen = len;
for (int r = 0; r < repeat; r++) {
temp[0] = head;
temp[1] = fn;
uint8_t ed = 0;
if (repeat-r > 1) ed = 17;
else ed = endLen;
for (int i = 2; i < ed+2; i++) {
temp[i] = str[(r*17)+i-2];
}
if (repeat-r > 1) temp[ed+2] = echoHD;
else temp[ed+2] = footHD;
temp[ed+3] = '\0';
SerialBT.print(temp);
delay(10);
}
}
void sendMessage(String str) {
send_message(str, connectHD, 0x04);
}
8. Set the function to continuously transmit the changed value of the Joystick according to the specified interval.
*** The Gravity Sensor always works in an active Mode.
true: Active Joystick Mode
false: Passive Joystick Mode (transmits only values when the slide bar is touched up)
void setActiveJoystick(bool val){
uint8_t setVal[4] = {optionHD, 0x01, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
9. Set transmission interval of ACTIVE JOYSTIC MODE. (Unit: Millisecond)
void setJoystickInterval(uint16_t val){
uint8_t setVal[4] = {optionHD, 0x02, val, val >> 8};
SerialBT.write(setVal, 4);
delay(10);
}
10. Set the range where the strength of the joystick becomes 0. (enter a value from 0 to 35)
void setJoyZeroRange(uint8_t val){
if (val > 35) val = 35;
uint8_t setVal[4] = {optionHD, 0x03, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
11. Set whether or not to use a function that converts the Strength value of Joystick or Gravity Sensor into a value between 0 and 10.
void setJoyStrengthAdjust(bool val){
uint8_t setVal[4] = {optionHD, 0x04, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
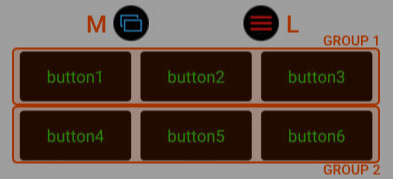
12. Set the group for the left arrow keypad.
// 1: independent 2: group1(up-down) / group2 (left-right) 4: group4(only 1)
void setLeftPadMode(uint8_t val){
if (val == 0 || val > 2) val = 4;
uint8_t setVal[4] = {optionHD, 0x05, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
13. Set the 4-way control of the joystick.
// 0: Left & Right False 1: Left 4 Way 2: Right 4Way 3: Both 4 Way
void setJoyWay4(uint8_t val){
uint8_t setVal[4] = {optionHD, 0x06, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
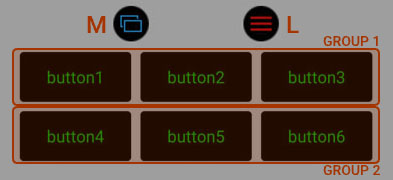
14. Set whether or not to display the group button.
// 0: none 1: group1 2: group1&2
void setDisplayAddButton(uint8_t val){
if (val > 2) val = 2;
uint8_t setVal[4] = {optionHD, 0x07, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
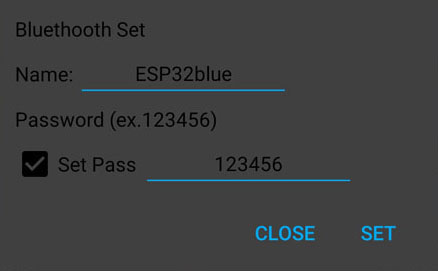
15. Set the operation function when clicking the label displaying the current connection status.

0: No function.
1: Show only connection information when it clicked.
2: Show connection information and password when it clicked so that the connection and password can be set.
// 0: not use, 1: show only name, 2: show name & pass, defalult: 2
void setSSIDLabelMode(uint8_t val) {
uint8_t setVal[4] = {optionHD, 0x08, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}* BLE is no need to pair with Mobile Phone and the Pin Number of BT05 only used for btween master and slave of BT05.
* If pairing is attempted, an error message is displayed.
16. Set the activation interval of the gravity sensor and transmission of the tilt value.
// defalt interval : 180 millis, 180, 180 * 6 = 1080
void useGravityAndInterval(uint16_t val){
uint8_t setVal[4] = {optionHD, 0x09, val, val >> 8};
SerialBT.write(setVal, 4);
delay(10);
}

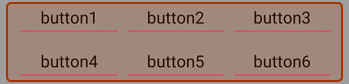
17. Set labels for buttons.
//F("BT1,BT2,BT3,BT4,BT5,BT6")
void setAddButtonLabel(String str){
send_message(str, optionHD, 0x0A);
}
18. Set the toggle/push properties of the left 4 buttons or 20 buttons of all.
//F("0000") // left pad: up-left-right-down
//F("00000000001111110000") // 0000:left, 0000:right, 001111110000:center
void setLeftPadOrAllToggle(String str){
send_message(str, optionHD, 0x0B);
}
19. Set the toggle/push properties of the right 4 buttons.
// F("0000") // right pad: top-left-right-bottom
void setRightPadToggle(String str){
send_message(str, optionHD, 0x0C);
}
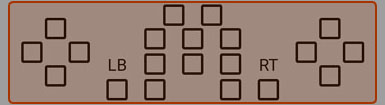
20. Set the toggle/push properties of the middle 12 buttons.
// F("000000000000") // center: view-menu-bt1-bt2-bt3-bt4-bt5-bt6-LB-LT-RB-RT
void setButtonToggle(String str){ // must after setLeftPadMode(uint8_t val)
send_message(str, optionHD, 0x0D);
}
21. Dialog Message: radio button
// option = "A,B,C" -> index = 1(A) ~ 3(C)
void dialogRadio(uint8_t id, String title, String option, uint8_t selection){
String str = F("RAD:");
str += String(id); str += ':';
str += title; str += ':';
str += option; str += ':';
str += String(selection);
send_message(str, optionHD, 0x0E);
} // Return -> RAD:0:1(index) , RAD:id:option index
22. Dialog Message: Checkbox
// option = "A,B,C"
void dialogCheckbox(uint8_t id, String title, String option){
String str = F("CKB:");
str += String(id); str += ':';
str += title; str += ':';
str += option;
send_message(str, optionHD, 0x0E);
} // Return -> CKB:0:1,3(index) , CKB:id:option index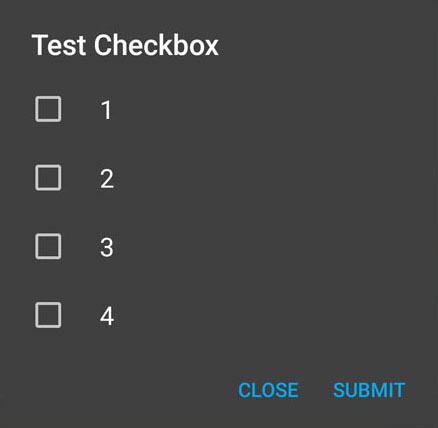
23. Dialog Message: Select button
// option = "A,B"
void dialogChoose(uint8_t id, String message, String option){
String str = F("CHD:");
str = String(id); str += ':';
str += message; str += ':';
str += option;
send_message(str, optionHD, 0x0E);
} // Return -> CHD:0:B , CHD:id:option str
24. Dialog Message: List Window
// option = "A,B,C,D,E,F,G,H"
void dialogList(uint8_t id, String title, String option){
String str = F("LSD:");
str += String(id); str += ':';
str += title; str += ':';
str += option;
send_message(str, optionHD, 0x0E);
} // Return -> LSD:0:F , LSD:id:option str
25. Dialog Message: Input text
void dialogInput(uint8_t id, String title){
String str = F("STR:");
str += String(id); str += ':';
str += title;
send_message(str, optionHD, 0x0E);
} // Return -> STR:0:str , STR:id:str
1.ARDUINO_BLE_JOYSTICK.zip
Main sketch
#include <SoftwareSerial.h>
#define BT_rxPin 3 // Bluetooth RX -> 3(arduino TX)
#define BT_txPin 2 // Bluetooth TX -> 2(arduino RX)
SoftwareSerial SerialBT(BT_txPin, BT_rxPin); // (arduino RX, arduino TX)
#include "protocol.h"
#define ledPin 13
void setup() {
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, LOW);
Serial.begin(9600);
SerialBT.begin(9600); //Bluetooth
Serial.println(sendData(F("NAMEBTO5"))); // SET NAME "BTO5"
Serial.println(sendData(F("RESET"))); // SOFTWARE REBOOT
Serial.println(F("Blutooth 4.0 BTO5"));
}
void pin_control(uint8_t value) {
if (value != 0) {
switch (value) {
case 11: Serial.println(F("button 1 : on"));
break;
case 10: Serial.println(F("button 1 : off"));
break;
case 21: Serial.println(F("button 2 : on"));
break;
case 20: Serial.println(F("button 2 : off"));
break;
case 31: Serial.println(F("button 3 : on"));
break;
case 30: Serial.println(F("button 3 : off"));
break;
case 41: Serial.println(F("button 4 : on"));
break;
case 40: Serial.println(F("button 4 : off"));
break;
case 51: Serial.println(F("button 5 : on"));
break;
case 50: Serial.println(F("button 5 : off"));
break;
case 61: Serial.println(F("button 6 : on"));
break;
case 60: Serial.println(F("button 6 : off"));
break;
case 71: Serial.println(F("button 7 : on"));
break;
case 70: Serial.println(F("button 7 : off"));
break;
case 81: Serial.println(F("button 8 : on"));
break;
case 80: Serial.println(F("button 8 : off"));
break;
case 91: Serial.println(F("button 9 : on"));
break;
case 90: Serial.println(F("button 9 : off"));
break;
case 101: Serial.println(F("button 10 : on"));
//uint8_t id, String title, String option
dialogList(0, F("MENU"), F("select,tomato,banana,mango"));
break;
case 100: Serial.println(F("button 10 : off"));
break;
case 111: Serial.println(F("button 11 : on"));
break;
case 110: Serial.println(F("button 11 : off"));
break;
case 121: Serial.println(F("button 12 : on"));
break;
case 120: Serial.println(F("button 12 : off"));
break;
case 131: Serial.println(F("button 13 : on"));
break;
case 130: Serial.println(F("button 13 : off"));
break;
case 141: Serial.println(F("button 14 : on"));
break;
case 140: Serial.println(F("button 14 : off"));
break;
case 151: Serial.println(F("button 15 : on"));
break;
case 150: Serial.println(F("button 15 : off"));
break;
case 161: Serial.println(F("button 16 : on"));
break;
case 160: Serial.println(F("button 16 : off"));
break;
case 171: Serial.println(F("button 17 : on"));
break;
case 170: Serial.println(F("button 17 : off"));
break;
case 181: Serial.println(F("button 18 : on"));
break;
case 180: Serial.println(F("button 18 : off"));
break;
case 191: Serial.println(F("button 19 : on"));
break;
case 190: Serial.println(F("button 19 : off"));
break;
case 201: Serial.println(F("button 20 : on"));
break;
case 200: Serial.println(F("button 20 : off"));
break;
case 210: Serial.println(F("button 21 : off"));
break;
case 220: Serial.println(F("button 22 : off"));
break;
}
}
}
// headingVal = false;
// Top
// 6 7 0
// \ | /
// Left 5 -- -- 1 Right
// / | \
// 4 3 2
// Bottom
bool headingVal = true;
void joystick_control(uint8_t id, uint16_t heading, uint8_t strength) {
//sendJoyEcho(id, heading, strength);
if (id == 0) Serial.print(F("L: "));
else if (id == 1) Serial.print(F("R: "));
else Serial.print(F("C: "));
if (headingVal) {
Serial.print(heading); Serial.print('/'); Serial.println(strength);
} else {
if (heading <= 23) heading = 359;
int8_t stickDir = (heading-23)/45;
Serial.println(stickDir);
}
}
bool appConnection = false;
uint8_t data[6] = {0, 0, 0, 0, 0, 0};
void SerialBT_read() {
if (SerialBT.available()) {
if (appConnection) {
if (SerialBT.peek() == joyHD) {
while (SerialBT.peek() == joyHD) { // OxF3
SerialBT.readBytes(data, 6);
if (data[5] == footHD) {
uint16_t value = data[3];
value = value << 8 | data[2];
joystick_control(data[1], value, data[4]);
data[5] = 0;
}
delay(1);
}
if (joyEcho) { sendJoyEcho(); joyEcho = 0; }
} else if (SerialBT.peek() == pinHD) { // OxF0
while (SerialBT.peek() == pinHD) { // need depend on left arrow pad mode
SerialBT.readBytes(data, 3);
if (data[2] == footHD) {
pin_control(data[1]);
data[2] = 0;
}
delay(1);
}
} else {
String hd = connectHDstr;
if (SerialBT.peek() == hd[0]) { // alarm
String temp = SerialBT.readStringUntil('\n');
if (temp.startsWith(hd)) {
temp.replace(hd,"");
if (temp == F("connect")) iniSet();
else if (temp == F("disconnect")) { appConnection = false; Serial.println(F("disconnect")); }
else if (temp.startsWith(F("NA"))) { sendMessage(F("This funtion is not available.")); }
else Serial.println(temp);
} else { temp.replace(optionHDstr,""); CheckF9(temp); }
} else {
uint8_t dump = SerialBT.read();
Serial.write(dump);
}
}
} else {
String hd = connectHDstr;
if (SerialBT.peek() == hd[0]) appConnection = true;
else { uint8_t dump = SerialBT.read(); }
}
}
}
void loop() {
SerialBT_read();
if(Serial.available()) { // if there is data in the serial buffer
String temp = Serial.readStringUntil('\n'); // option of serial monitor: NEW LINE
Serial.println(temp);
if (temp == F("1")) {
//EEPROM.write(1023, 0);
//Serial.println("EEPROM INI");
} else if (temp == F("2")) {
}
}
}
Protocol sketch
//////////////////////////////////////////////////////////// COMMON
///////////////////////////////////////// ESSENTIAL
#define pinHD 0xF0
#define joyHD 0xF3
#define strHD 0xF4
#define footHD 0xF1
#define echoHD 0xE1
#define connectHD 0xF8
#define connectHDstr F("%%F8")
#define optionHD 0xF9
#define optionHDstr F("%%F9")
void sendPinState(uint8_t pin_val){
uint8_t pin[3] = {pinHD, pin_val, footHD};
SerialBT.write(pin, 3);
delay(10);
}
void sendPinEcho(uint8_t pin_val){
uint8_t pin[3] = {pinHD, pin_val, echoHD};
SerialBT.write(pin, 3);
delay(10);
}
// id 0:Left Joystick, 1:Right Joystick 2:Gravity Sensor(change only text)
void sendJoyState(uint8_t id, uint16_t heading, uint8_t strength) {
uint8_t joy[6] = {joyHD, id, heading, heading >> 8, strength, footHD};
SerialBT.write(joy, 6);
delay(10);
}
uint8_t joyEcho = 0;
uint8_t ecVal[12] = { 0, };
void send_joy_echo(uint8_t id, uint16_t heading, uint8_t strength) {
if (joyEcho > 2) joyEcho = 0;
ecVal[joyEcho*4] = id;
ecVal[(joyEcho*4)+1] = heading;
ecVal[(joyEcho*4)+2] = heading >> 8;
ecVal[(joyEcho*4)+3] = strength;
joyEcho++;
}
void sendJoyEcho() {
uint8_t ch = 0;
while (joyEcho) {
joyEcho--;
uint8_t joy[6] = {joyHD, ecVal[ch*4], ecVal[(ch*4)+1], ecVal[(ch*4)+2], ecVal[(ch*4)+3], echoHD};
SerialBT.write(joy, 6); ch++; delay(10);
}
}
void sendText(String str) {
char temp [21]; // 18
uint16_t len = str.length();
uint8_t repeat = 1;
uint8_t endLen = 0;
if (len > 18) {
repeat = (len/18)+1;
endLen = (len%18);
} else endLen = len;
for (int r = 0; r < repeat; r++) {
temp[0] = strHD;
uint8_t ed = 0;
if (repeat-r > 1) ed = 18;
else ed = endLen;
for (int i = 1; i < ed+1; i++) {
temp[i] = str[(r*18)+i-1];
}
if (repeat-r > 1) temp[ed+1] = echoHD;
else temp[ed+1] = footHD;
temp[ed+2] = '\0';
SerialBT.print(temp);
delay(10);
}
}
///////////////////////////////////////// CONNECTION
void sendDisconnect(){ // order disconnect to App
uint8_t setVal[3] = {connectHD, 0x01, 0x00};
SerialBT.write(setVal, 3);
delay(10);
}
void send_message(String str, uint8_t head, uint8_t fn) {
char temp [21]; // 18
uint16_t len = str.length();
uint8_t repeat = 1;
uint8_t endLen = 0;
if (len > 17) {
repeat = (len/17)+1;
endLen = (len%17);
} else endLen = len;
for (int r = 0; r < repeat; r++) {
temp[0] = head;
temp[1] = fn;
uint8_t ed = 0;
if (repeat-r > 1) ed = 17;
else ed = endLen;
for (int i = 2; i < ed+2; i++) {
temp[i] = str[(r*17)+i-2];
}
if (repeat-r > 1) temp[ed+2] = echoHD;
else temp[ed+2] = footHD;
temp[ed+3] = '\0';
SerialBT.print(temp);
delay(10);
}
}
void sendMessage(String str) {
send_message(str, connectHD, 0x04);
}
///////////////////////////////////////// OPTION
///////////////////////// SET FUNCION
void setActiveJoystick(bool val){
uint8_t setVal[4] = {optionHD, 0x01, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
// SEND SLIDE GET VALUE INTERVAL
void setJoystickInterval(uint16_t val){
uint8_t setVal[4] = {optionHD, 0x02, val, val >> 8};
SerialBT.write(setVal, 4);
delay(10);
}
void setJoyZeroRange(uint8_t val){
if (val > 35) val = 35;
uint8_t setVal[4] = {optionHD, 0x03, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
void setJoyStrengthAdjust(bool val){
uint8_t setVal[4] = {optionHD, 0x04, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
// 1: independent 2: group1(up-down) / group2 (left-right) 4: group4(only 1)
void setLeftPadMode(uint8_t val){
if (val == 0 || val > 2) val = 4;
uint8_t setVal[4] = {optionHD, 0x05, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
// 0: Left & Right False 1: Left 4 Way 2: Right 4Way 3: Both 4 Way
void setJoyWay4(uint8_t val){
uint8_t setVal[4] = {optionHD, 0x06, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
// 0: none 1: group1 2: group1&2
void setDisplayAddButton(uint8_t val){
if (val > 2) val = 2;
uint8_t setVal[4] = {optionHD, 0x07, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
// 0: not use, 1: show only name, 2: show name & pass, defalult: 2
void setSSIDLabelMode(uint8_t val) {
uint8_t setVal[4] = {optionHD, 0x08, val, 0x00};
SerialBT.write(setVal, 4);
delay(10);
}
// defalt interval : 180 millis, 180, 180 * 6 = 1080
void useGravityAndInterval(uint16_t val){
uint8_t setVal[4] = {optionHD, 0x09, val, val >> 8};
SerialBT.write(setVal, 4);
delay(10);
}
//F("BT1,BT2,BT3,BT4,BT5,BT6")
void setAddButtonLabel(String str){
send_message(str, optionHD, 0x0A);
}
//F("0000") // left pad: up-left-right-down
void setLeftPadOrAllToggle(String str){
send_message(str, optionHD, 0x0B);
}
// F("0000") // right pad: top-left-right-bottom
void setRightPadToggle(String str){
send_message(str, optionHD, 0x0C);
}
// F("000000000000") // center: view-menu-bt1-bt2-bt3-bt4-bt5-bt6-LB-LT-RB-RT
void setButtonToggle(String str){ // must after setLeftPadMode(uint8_t val)
send_message(str, optionHD, 0x0D);
}
///////////////////////// PERFORM DIALOG
// option = "A,B,C" -> index = 1(A) ~ 3(C)
void dialogRadio(uint8_t id, String title, String option, uint8_t selection){
String str = F("RAD:");
str += String(id); str += ':';
str += title; str += ':';
str += option; str += ':';
str += String(selection);
send_message(str, optionHD, 0x0E);
} // Return -> RAD:0:1(index) , RAD:id:option index
// option = "A,B,C"
void dialogCheckbox(uint8_t id, String title, String option){
String str = F("CKB:");
str += String(id); str += ':';
str += title; str += ':';
str += option;
send_message(str, optionHD, 0x0E);
} // Return -> CKB:0:1,3(index) , CKB:id:option index
// option = "A,B"
void dialogChoose(uint8_t id, String message, String option){
String str = F("CHD:");
str = String(id); str += ':';
str += message; str += ':';
str += option;
send_message(str, optionHD, 0x0E);
} // Return -> CHD:0:B , CHD:id:option str
// option = "A,B,C,D,E,F,G,H"
void dialogList(uint8_t id, String title, String option){
String str = F("LSD:");
str += String(id); str += ':';
str += title; str += ':';
str += option;
send_message(str, optionHD, 0x0E);
} // Return -> LSD:0:F , LSD:id:option str
void dialogInput(uint8_t id, String title){
String str = F("STR:");
str += String(id); str += ':';
str += title;
send_message(str, optionHD, 0x0E);
} // Return -> STR:0:str , STR:id:str
//////////////////////////////////////////////////////////// INDIVIDUAL
void iniSet() {
setAddButtonLabel(F("BT1,BT2,BT3,BT4,BT5,BT6"));
setDisplayAddButton(2); // 0: none 1: group1 2: group1&2
setLeftPadMode(1); // 1: independent 2: group1(up-down) / group2 (left-right) 4: group4(only 1)
setLeftPadOrAllToggle(F("00000000001111110000"));
setJoyWay4(false);
setActiveJoystick(true); setJoystickInterval(100);
setJoyStrengthAdjust(true);
setSSIDLabelMode(0); // not use change btName
//useGravityAndInterval(180 * 2);
}
String sendData(String order) {
String command = F("AT+");
command += order;
command += F("\r\n");
SerialBT.print(command); // send the read character to the SerialBT
long int time = millis();
String response = "";
while( (time+500) > millis()) {
while(SerialBT.available()) {
char c = SerialBT.read(); //
response+=c;
}
if (response.indexOf(F("OK")) != -1) break;
}
return response;
}
void CheckF9(String temp) {
Serial.println(temp);
if (temp.startsWith(F("RAD"))) { }
else if (temp.startsWith(F("CKB"))) { }
else if (temp.startsWith(F("CHD"))) { }
else if (temp.startsWith(F("LSD"))) { }
else if (temp.startsWith(F("STR"))) { }
}
Example of using Protocol to set ADUPAD app
- ADUPAD app settings: label/toggle properties, Joystic Mode settings, etc.
void iniSet() {
setAddButtonLabel(F("BT1,BT2,BT3,BT4,BT5,BT6"));
setDisplayAddButton(2); // 0: none 1: group1 2: group1&2
setLeftPadMode(1); // 1: independent 2: group1(up-down) / group2 (left-right) 4: group4(only 1)
setLeftPadOrAllToggle(F("00000000001111110000"));
setJoyWay4(false);
setActiveJoystick(true); setJoystickInterval(100);
setJoyStrengthAdjust(true);
setSSIDLabelMode(0); // not use change btName
//useGravityAndInterval(180 * 2);
}
- Example of code processing for each function of a button that changes according to the leftPadMode and menu-related button.
void pin_control(uint8_t value) {
if (value != 0) {
switch (value) {
case 11: if (leftPadMode > 1) Serial.println(F("Up DIR"));
else Serial.println(F("button 1 : on"));
break;
case 10: if (leftPadMode > 1) Serial.println(F("Up off"));
else Serial.println(F("button 1 : off"));
break;
case 21: if (leftPadMode > 1) Serial.println(F("Left DIR"));
else Serial.println(F("button 2 : on"));
break;
case 20: if (leftPadMode > 1) Serial.println(F("Left off"));
else Serial.println(F("button 2 : off"));
break;
case 31: if (leftPadMode > 1) Serial.println(F("Right DIR"));
else Serial.println(F("button 3 : on"));
break;
case 30: if (leftPadMode > 1) Serial.println(F("Right off"));
else Serial.println(F("button 3 : off"));
break;
case 41: if (leftPadMode > 1) Serial.println(F("Down DIR"));
else Serial.println(F("button 4 : on"));
break;
case 40: if (leftPadMode > 1) Serial.println(F("Down off"));
else Serial.println(F("button 4 : off"));
break;
case 91: Serial.println(F("button 9 : on"));
//uint8_t id, String title, String option
dialogList(0, F("LEFT PAD"), F("SELECT,TOGGLE,PUSH")); // dialog message
break;
case 90: Serial.println(F("button 9 : off"));
break;
case 101: Serial.println("button 10 : on");
//uint8_t id, String title, String option
dialogList(2, F("RIGHT PAD"), F("SELECT,TOGGLE,PUSH")); // dialog message
break;
}
}
}
- Example of modifying the function "CheckF9()" that handles dialog messages.
void CheckF9(String temp) {
Serial.println(temp);
if (temp.startsWith(F("RAD"))) { } // radio button
else if (temp.startsWith(F("CKB"))) { } // Checkbox
else if (temp.startsWith(F("CHD"))) { } // Select button
else if (temp.startsWith(F("LSD"))) { // List Window
int ed = temp.indexOf(':');
temp.remove(0, ed+1);
ed = temp.indexOf(':');
String ID = temp.substring(0, ed);
uint8_t id = ID.toInt();
temp.remove(0, ed+1);
if (id == 0) {
if (temp.startsWith(F("PUS"))) { leftPadMode = 0; setLeftPadOrAllToggle(F("0000")); }
else if (temp.startsWith(F("TOG"))) {
setLeftPadOrAllToggle(F("1111")); // set toggle for left button
dialogList(1, F("LEFT PAD MODE AT TOGGLE"), F("SELECT,INDIVIDUAL,TWO GROUP,ONLY ONE")); // dialog message
}
} else if (id == 1) {
if (temp.startsWith(F("IND"))) leftPadMode = 1; // independant
else if (temp.startsWith(F("TWO"))) leftPadMode = 2; // 2 group: up/down, left/right
else if (temp.startsWith(F("ONL"))) leftPadMode = 4; // 4psc button is 1 group
setLeftPadMode(leftPadMode);
} else if (id == 2) {
if (temp.startsWith(F("PUS"))) { rightPadMode = 0; setRightPadToggle(F("0000")); } // set push for right button
else { rightPadMode = 1; setRightPadToggle(F("1111")); }
}
}
else if (temp.startsWith(F("STR"))) { } // Input text
}
2.ARDUINO_BLE_JOYSTICK_MENU.zip
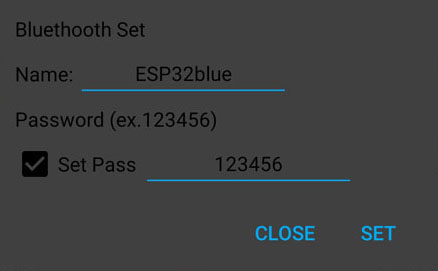
Change name of BT05 on ADUPAD App
- Define array variable to save the name for BT05.
char btName[11] = "BTO5"; // 10 char
- EEPROM Setting
#include <EEPROM.h>
void loadConfig() { Read name
for (int i = 0; i < 11; i++) btName[i] = EEPROM.read(1012 + i); // sizeof(pass)-1
}
void saveConfig() { // Write name
for (int i = 0; i < 11; i++) EEPROM.write(1012 + i, btName[i]); // sizeof(pass)-1
}
// After uploading the sketch to the Arduino, write it once to the EEPROM or read the values stored in the EEPROM when booting.
void setup() {
if(EEPROM.read(1023) != 1) {
for (int i = 0 ; i < EEPROM.length() ; i++) EEPROM.write(i, 0); // EEPROM Clear
EEPROM.write(1023, 1); // flag for status of saving
saveConfig(); // Write ID and Password at initialization
} else loadConfig(); // Read saved ID and Password when Arduino is rebooting
}
// EEPROM initialization code at serial monitor
void loop() {
if(Serial.available()) { // Serial monitor code
String temp = Serial.readStringUntil('\n');
Serial.println(temp);
if (temp == F("1")) {
EEPROM.write(1023, 0);
Serial.println("EEPROM INI");
}
}
}
- If there is a PIN number in received data, remove it and then save parsing data for name and send a message applyed in Arduino.
void changeBTname(String str) { // NA1empty0HC06
bool save = false;
String temp = str.substring(0, 1);
bool delPass = temp.toInt();
str.remove(0, 1);
if (delPass) str.remove(0, 6);
if (str != btName) {
if (temp != "") {
for (int i = 0; i < str.length(); i++) btName[i] = str[i];
btName[str.length()] = '\0';
save = true;
}
}
Serial.println(btName);
if (save) {
saveConfig();
temp = F("<p> NAME: ");
temp += btName;
temp += F("</p>Value's Saved.");
temp += F(" It will disconnect for Setting.<br/>try to reconnect.");
sendMessage(temp);
sendDisconnect(); delay(2000);
Serial.println(sendData(changeName(btName))); // SET NAME "BTO5"
Serial.println(sendData(F("RESET"))); // SOFTWARE REBOOT
} else sendMessage(F("There's no change."));
}
3.ARDUINO_BLE_JOYSTICK_NAME.zip
ARDUINO_EEPROM_INI.zip
* Change all data to 0 in EEPROM
[Arduino/ADUPAD] - ADUPAD - Arduino wireless remote control PAD application
'Arduino > ADUPAD' 카테고리의 다른 글
| ESP32 BLE remote control with ADUPAD (0) | 2022.12.04 |
|---|---|
| ESP32 Bluetooth remote control with ADUPAD (0) | 2022.12.04 |
| ESP32/NodeMcu WiFi remote control with ADUPAD (0) | 2022.12.03 |
| Arduino Bluetooth remote control with ADUPAD and HC-06 (0) | 2022.11.24 |
| Arduino WiFi remote control with ADUPAD and ESP-01 (0) | 2022.11.21 |
| ADUPAD - Arduino wireless remote control PAD application (0) | 2022.10.01 |